|
PID regulator v 1.0
|

|
|
PID regulator v 1.0
|
|
Implementacja sterownika silnika DC z użyciem sygnału PWM generowanego przez timer mikrokontrolera STM32. More...
#include "cytronDriver.h"Functions | |
| void | Cytron_Set_Motor_Direction (driver_struct *driver, Cytron_Direction direction) |
| Ustawia kierunek obrotów silnika. Kierunek wynika z działania sterownika: in1 high, in2 low -> cw; in1 low, in2 high -> ccw. | |
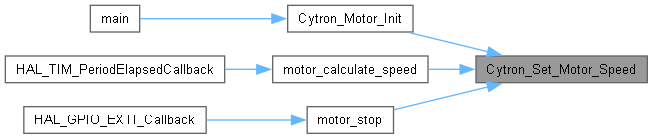
| void | Cytron_Set_Motor_Speed (driver_struct *driver, uint16_t speed) |
| Ustawia prędkość obrotów silnika. Prędkość ograniczona do maksymalnej wartości ARR timera. | |
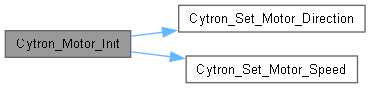
| void | Cytron_Motor_Init (driver_struct *driver, TIM_HandleTypeDef *PWM_timer) |
| Inicjalizuje sterownik silnika z domyślnymi wartościami. Ustawia kierunek na zgodny z ruchem wskazówek zegara (cw) i prędkość na 0. | |
Implementacja sterownika silnika DC z użyciem sygnału PWM generowanego przez timer mikrokontrolera STM32.
Created on: Dec 1, 2024 Author: Igor
| void Cytron_Motor_Init | ( | driver_struct * | driver, |
| TIM_HandleTypeDef * | PWM_timer ) |
Inicjalizuje sterownik silnika z domyślnymi wartościami. Ustawia kierunek na zgodny z ruchem wskazówek zegara (cw) i prędkość na 0.
Inicjalizuje sterownik silnika z początkową prędkością 0 i domyślnym kierunkiem.
| driver | Wskaźnik do struktury sterownika silnika. |
| PWM_timer | Wskaźnik do timera generującego PWM. |

| void Cytron_Set_Motor_Direction | ( | driver_struct * | driver, |
| Cytron_Direction | direction ) |
Ustawia kierunek obrotów silnika. Kierunek wynika z działania sterownika: in1 high, in2 low -> cw; in1 low, in2 high -> ccw.
Ustawia kierunek obrotów silnika.
| driver | Wskaźnik do struktury sterownika silnika. |
| direction | Kierunek obrotów (cw - zgodnie z ruchem wskazówek zegara, ccw - przeciwnie). |

| void Cytron_Set_Motor_Speed | ( | driver_struct * | driver, |
| uint16_t | speed ) |
Ustawia prędkość obrotów silnika. Prędkość ograniczona do maksymalnej wartości ARR timera.
Ustawia prędkość obrotów silnika.
| driver | Wskaźnik do struktury sterownika silnika. |
| speed | Wartość PWM określająca prędkość (0 do wartości ARR). |